1) 眼振頭位キャプチャーソフト(CapNYS)for Windows
2) 眼振頭位キャプチャーソフト(iCapNYS)for iPhone
3) 眼振頭位キャプチャーソフト(aCapNYS)for Android
上記の3種類を作っています。
1) 眼振頭位キャプチャーソフト(CapNYS)/for Windows
CapNYS(64bit)/Version7.4:2025/6/9(38MB) ダウンロード
English version download
ソフトの概要
赤外線眼振カメラの映像に、頭位情報を頭位アニメーションとして合成するソフトです。
医療機器メーカの赤外線眼振カメラ装置をデジ造などでパソコンと繋げば、このソフトを使って眼振映像と頭位を同時に記録できます。
頭位はキーボード、マウスなどで入力出来ます。モーションセンサー装置を自作すれば、自動で入力出来ます。
スマホに内蔵のモーションセンサーも使えます。iPhone では iCapNYS アプリ、Androidでは aCapNYS アプリをインストールすると、内蔵センサーの動きをWiFiで送れます。両アプリとも無料です。
「 vcruntime140_1.dll が無い」と言われて、CapNYSが起動できないときは、
マイクロソフトのサイトから「Redistributable packages for Visual Studio 2015, 2017, 2019, and 2022.」をダウンロード、インストールして下さい。
頭位入力方法その1:マウス、テンキー、テンキーボード
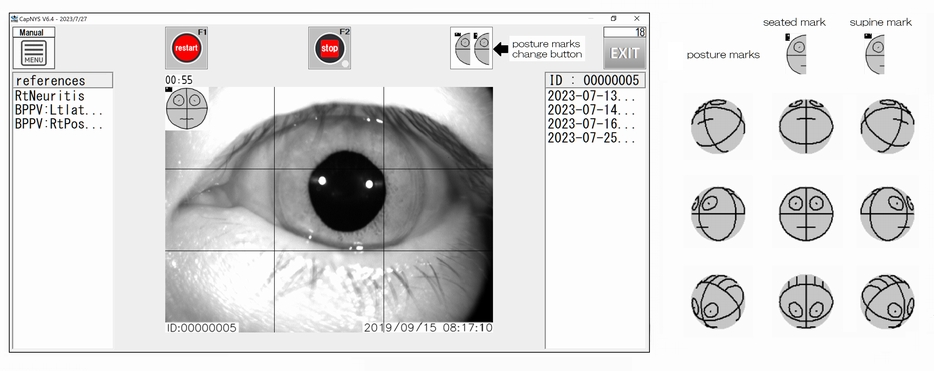
上はマニュアルモード検査時の画面です。マウス、タッチスクリーンでは画面の9個のいずれかの枠をクリック、タッチすることで上右の頭位を入力できます。座位モード、仰臥位モードいずれかのマークを頭位アニメーションの左上隅に表示できます。
テンキー、テンキーボードでも9通りの頭位を入力出来ます。テンキーが無いときは、キーボードの789uiojklキーで入力できます。
お面を被った本人がテンキーを押しています。左上隅に頭位アニメーション(座位モード)が写しこまれています。
頭位入力方法その2:モーションセンサー装置
センサー装置(作り方ページ)を赤外線カメラに取り付ければ自動的に頭位データを取り込めます。
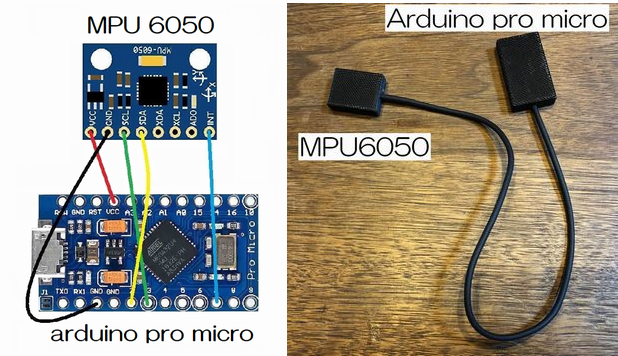
MPU6050 というモーションセンサーと arduino pro micro というマイコンを電線でつないで、このマイコンにプログラムを書き込みます。arduino_pro_microとMPU-6050の両方合わせて1000円程度で買えます。
頭位入力方法その3:スマホートホン
iPhoneにiCapNYS(下記)をインストールすれば、内蔵のモーションセンサーがつかえます。AndroidではaCapNYSをインストールして下さい。CapNYSのメニューから頭位入力方法を Gyro(phone-WiFi) とすると、CapNYSの動いているPCのIP-Address が表示されます。その Address を iCapNYS, aCapNYSを設定してください。
2) 眼振頭位キャプチャーアプリ(iCapNYS)/ for iPhone
iCapNYS/ Version4.3:2024年3月6日
Windows版のCapNYS.exeをiPhoneに移植したものです。iPhoneのモーションセンサー値から頭の動きのアニメーションを作り、眼球運動動画に合成します。iCapNYSアルバムを作って、その中に録画保存します。動画はトップページに一覧表示され、項目をタップすると再生します。項目を左にスワイプすると削除出来ます。動画の管理はiPhoneの写真アプリでも行えます。
フロントカメラとバックカメラの両方を利用することが出来ます。
フロントカメラを利用するときは、慣れれば手で固定するだけでも綺麗な映像がとれますが、下図の様にダンボールを折り曲げただけの簡単な装具を使って固定すると、綺麗な映像が撮れます。
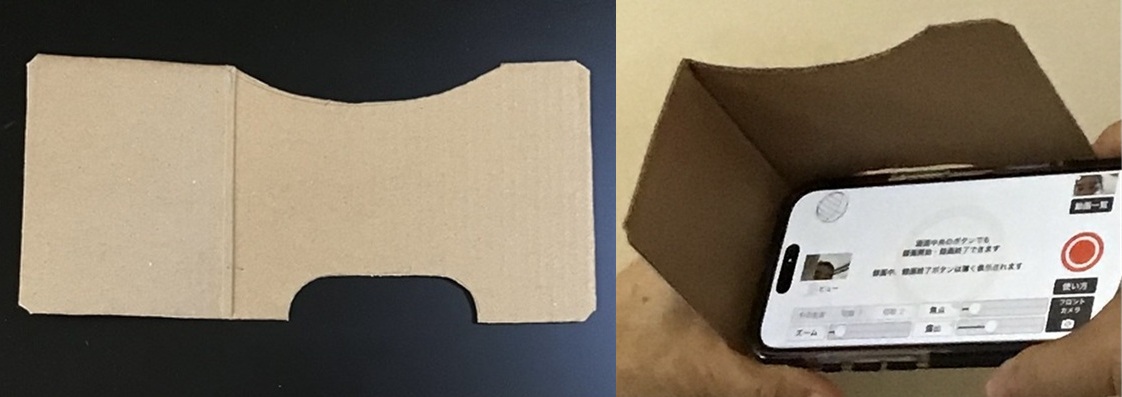
バックカメラの場合は、3Ⅾプリンターで作ったゴーグルでiPhoneを固定しています。照明はダイソーのLEDライトライトです。両面粘着ゲルテープでiPhoneを固定しています。このゴーグルを使う場合は、切り取りを「切取り2」に設定します。固定具の3Dデータはここからダウンロードできます。

下の2個の動画は、フロントカメラとバックカメラで撮影したものです。仰臥位で頭位を右下~左下に動かしています。iPhone 12 miniで撮影したものですが、バックカメラの方が鮮明です。
下が iCapNYS の apple store ダウンロードページです。iPhoneでご覧なら下QRコード部分をクリックしてください。

iCapNYS - TestFlight版
お使いのiPhoneにTestTFlightアプリが入ってないときは、まずTestFlightがインストールされ、その後TestFlight用のiCapNYSアプリがインストールされます。

3) 眼振頭位キャプチャーアプリ(aCapNYS)/ for Android
aCapNYS/ Version1.2:2024年8月26日
iPhone版の iCapNYS を Androidに移植したものです。Android のモーションセンサー値から頭の動きのアニメーションを作り、眼球運動動画に合成します。動画はトップページに一覧表示され、項目をタップすると再生します。項目を長押しすると削除出来ます。
フロントカメラとバックカメラの両方を利用することが出来ます。
眼振の録画は上記の iCapNYS の方法に準じて行ってください。
下が aCapNYS の google play store ダウンロードページです。Android でご覧なら下QRコード部分をクリックしてください。
